IAM02 - Smart Door Lock
Avancement
Semaine 1:
Cette semaine a essentiellement été consacrée à la collaboration
avec Julien Andry pour la réalisation de la coque ( mise en cohérence de la forme et de la fonction )
ainsi qu'à la recherche d'une
solution pour le pilotage du servomoteur depuis la carte "PhidgetInterfaceKit 8/8/8". Julien Holtzer
s'est proposé pour la réalisation de cette carte mais nous avons tout de même tenu
à trouver par nous même une solution alternative pour le cas où Mr Holtzer rencontrerait des
ennuis. Nous avons retenu 2 sociétés pour intervenir:
JLC Prototypes pour la réalisation de circuits imprimés.
Technika 06 pour la conception du circuit.
Finallement, c'est Mr Holtzer qui assure la conception et la réalisation du circuit de pilotage, et nous
le remercions infiniment pour ca.
Semaine 2:
Pendant cette semaine nous avons étudié les différentes technos à
notre disposition pour la réalisation du projet. Nous aurions énormément aprécié
l'intégration d'upnp dans le NSLU mais cela ne s'inscrit pas dans la logique d'évolution
du système pour des problèmes de sécurité. Nous utiliserons donc php4/nuSoap côté
NSLU pour l'utilisation de webservices (Client et Server). Les fonctionnalités bluetooth seront
implémentées grâce aux commandes déjà présentes car nous avons rencontré
beaucoup de difficultées pour trouver les librairies nécéssaires au pilotage des devices
bluetooth depuis du code C ( et leur intégration dans l'environnement de compilation croisé ).
Côté serveur, nous utiliserons un serveur Glassfish pour la faciliter d'utilisation et l'
indépendance plateforme, ainsi que certains services Mail/SMS mis à notre disposition par Orange.
Le système d'exploitation remplacant le firmware de base du NSLU sera un openWRT kamikaze 8RC2.
Semaine 3:
Début de la mise en commun des travaux pour avoir une première interface de
communication et nous assurer que les 3 niveaux applicatifs correspondaient bien entre eux ( natif sur NSLU,
WS sur NSLU et WS sur serveur ).
Semaine 4:
A la réception de notre objet, on a pu s'apercevoir de plusieurs anomalies et nous ne savons pas
encore comment les résoudre.
Nous attendons la réception de la carte du contrôle de cervo moteur pour prendre les décisions finales.
Comme nous pouvons le voir sur le dessin ci-dessous
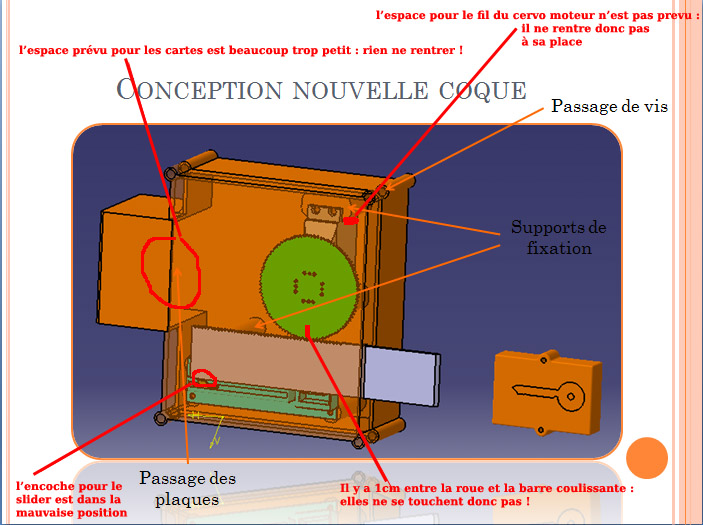
-
L'encoche pour le slider a été mal pensée. Elle est prévue pour rentrer à l'horizontale
alors que la languette du slider est à la verticale. Ce problème pourra être résolu avec un peu de bidouille. -
La roue et la barre coulissante ne se touchent pas. Il y a un écart d'environ un centimètre.
Nous ne savons pas encore comment résoudre ce problème car le cervo moteur devra peut être être
changé de place (problème 3). -
Le cervo moteur entre exactement (il faut forcer un peu) à la place prévue, sauf que les fils alimentant ce dernier
n'ont pas été prévu dans cette place. Il faut donc trouver une autre place pour le cervo moteur ou bien
repenser le design intérieur. -
Le problème le plus important est le fait que la carte (interface kit 888) ne rentre ni à la place à laquelle
elle devait être, ni autre part dans l'objet. A l'heure actuelle, nous ne savons pas du tout où nous allons la placer.
Nous attendons l'autre carte (contrôle du cervo moteur) que devrait nous livrer Julien Holtzer lundi 9 février au soir.
Semaine 5 :
Rendu final :
video 1 : enveloppe interne
video 2 : première fonctionnalité part1 part2
video 3 : deuxième fonctionnalité